Think about a factory oven that needs to reach 180°C before production can start. If the heating system reacts too aggressively, the temperature shoots past 180°C and the entire batch risks getting damaged. If the system reacts too cautiously, the oven takes too long to warm up, and production gets delayed.
Engineers face this tradeoff all the time. Fast response causes overshoot. Slow response avoids overshoot but wastes time. Traditional PID controllers force you to choose between the two.
US7249882B2 addresses this exact problem in temperature control systems. Instead of letting the integral part of a PID controller start from zero, the patent introduces a way to calculate a better starting value during auto-tuning. By observing how the temperature naturally rises and falls, the controller estimates where integration should begin, helping the system reach the target temperature faster without crossing it.
This approach is currently central to a dispute between iMod Systems LLC and TGA Industries Limited.
To understand how this idea fits into the broader evolution of PID control, we used the Global Patent Search tool to trace earlier patents that shaped this approach.
How This Patent Actually Improves Temperature Control
To understand this patent, it helps to forget equations for a moment and think about behavior.
In a typical PID controller, the integral part always starts from zero. That means when you turn the system on, the controller slowly accumulates errors over time before it can stabilize the temperature. This is why many systems either take too long to settle or overshoot the target before calming down.
US7249882B2 changes that starting point.
When auto-tuning is activated, the controller intentionally lets the temperature move slightly above and below the target range. During this short on-off cycle, it watches how high the temperature peaks and how low it drops. These two values form a natural temperature wave.
Using that wave, the controller calculates a smarter initial integration value instead of beginning from zero. Think of it as giving the PID controller a head start based on how the system actually behaves, not on a preset assumption.
As the temperature gets close to the target, this estimated integration value is applied. The system reaches stability faster, without the sharp temperature spike or the slow crawl that usually follows traditional tuning.
Key Features of This PID Control Method
At its core, this patent focuses on making temperature control faster and more stable without changing the basic structure of a PID controller.
- Smart integration starting point: Instead of starting integration from zero, the controller calculates a more accurate initial value based on real system behavior.
- Uses auto-tuning temperature swings: The method observes natural temperature rise and fall during auto-tuning to understand how the system responds.
- Reduces temperature overshoot: By applying the estimated integration value near the target temperature, the system avoids crossing the set point.
- Shorter settling time: The controller reaches stable temperature faster, saving time in industrial processes.
- Works with existing PID controllers:The approach improves performance without redesigning or replacing standard PID control logic.
Together, these features turn PID tuning from a slow trial-and-error process into a more predictable and efficient temperature control strategy.
Overshoot is not unique to temperature systems. Aircraft face the same risk when control feedback lags behind real motion. US7400950B2 shows how optical flow sensing allowed flight systems to stabilize hover and position by continuously measuring movement instead of reacting late.
Earlier Patents That Led to Smarter PID Control
US7249882B2 builds on earlier attempts to make temperature control faster and more stable without constant manual tuning. Over time, engineers explored on-off control, auto-tuning methods, and different ways to handle temperature error to reduce overshoot and settling time.
Using the Global Patent Search tool, we traced earlier patents that tackled pieces of this problem from different angles. Each of these inventions contributed a step toward the smarter integration approach used in this patent.
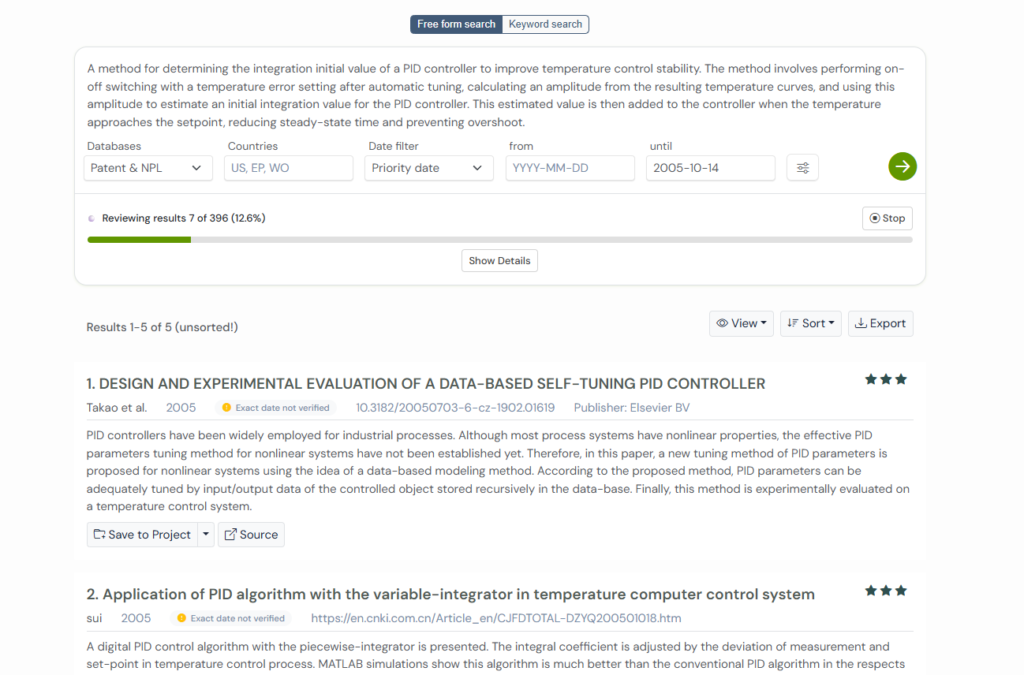
Let’s look at them one by one.
1. JPH033007A
Auto-tuning is supposed to make life easier. You let the controller figure things out, wait for it to finish, and expect the system to settle down smoothly. But in reality, that moment when auto-tuning ends is often messy. The temperature is still bouncing, delays are still catching up, and switching straight into PID control can make the system wobble before it finally stabilizes.
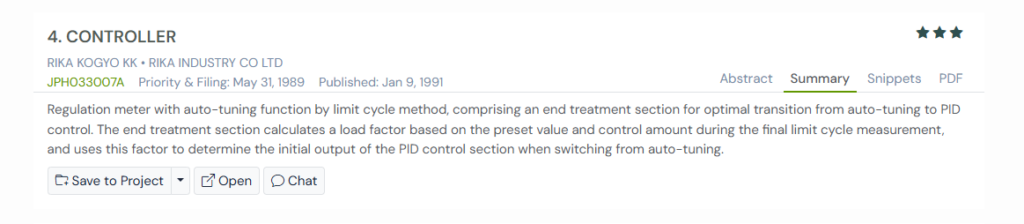
JPH033007A, filed in 1989, focuses on fixing this exact moment. Instead of cutting auto-tuning off abruptly, the patent introduces a short transition phase. The controller briefly holds its output, adjusts it based on the system’s load, and only then switches to PID control. This gives the system time to calm down before fine control takes over.
That idea connects directly to US7249882B2. Both recognize that how a controller starts or switches modes matters just as much as how it runs afterward.
Why This Approach Mattered
This patent highlighted that instability often comes from when control changes happen, not just from poor tuning. By smoothing the transition from auto-tuning to PID control, it helped systems stabilize faster and reduced unnecessary temperature swings.
Ideas like smoother response and faster settling time do not stay confined to controllers and tuning charts. They show up in how modern power grids operate. This Smart Grid tech innovations piece explores how feedback loops, demand response, and adaptive control now run across national energy networks, where a single overshoot is not a spike, but a blackout risk.
2. JPS598001A
Anyone who has worked with temperature controllers has seen this happen. You shut a system down, everything is stable. Then you power it back on and suddenly the temperature overshoots again, even though nothing has changed. The controller behaves as if it has forgotten where it was a few minutes ago, and the system needs time to calm down all over again.
JPS598001A, filed in Japan by Omron Corporation, looks directly at this power-on problem in PID controllers. The patent focuses on what happens to the integral value when power is cut and restored. Instead of letting integration restart blindly from zero, the controller displays the stable control value and allows it to be set back into the system as a bias. This way, when power is applied again, the controller resumes from a known, stable state rather than rebuilding control from scratch.
This idea connects naturally to US7249882B2. Both recognize that overshoot often comes from poor initialization, not bad control logic. Where this patent preserves integration across power cycles, US7249882B2 estimates a better integration starting value during auto-tuning to avoid overshoot in the first place.
Why This Approach Mattered
This patent showed that stability depends on how control begins, not just how it runs. By preserving or restoring integration intelligently, it reduced power-on overshoot and made PID control more predictable in real-world systems.
3. JPH02254501A
When a production line pauses and then restarts, the system rarely picks up smoothly from where it left off. If the target temperature or process value has changed during the stop, the controller often reacts too aggressively or too cautiously. That leads to overshoot, undershoot, and wasted time waiting for the process to stabilize again.
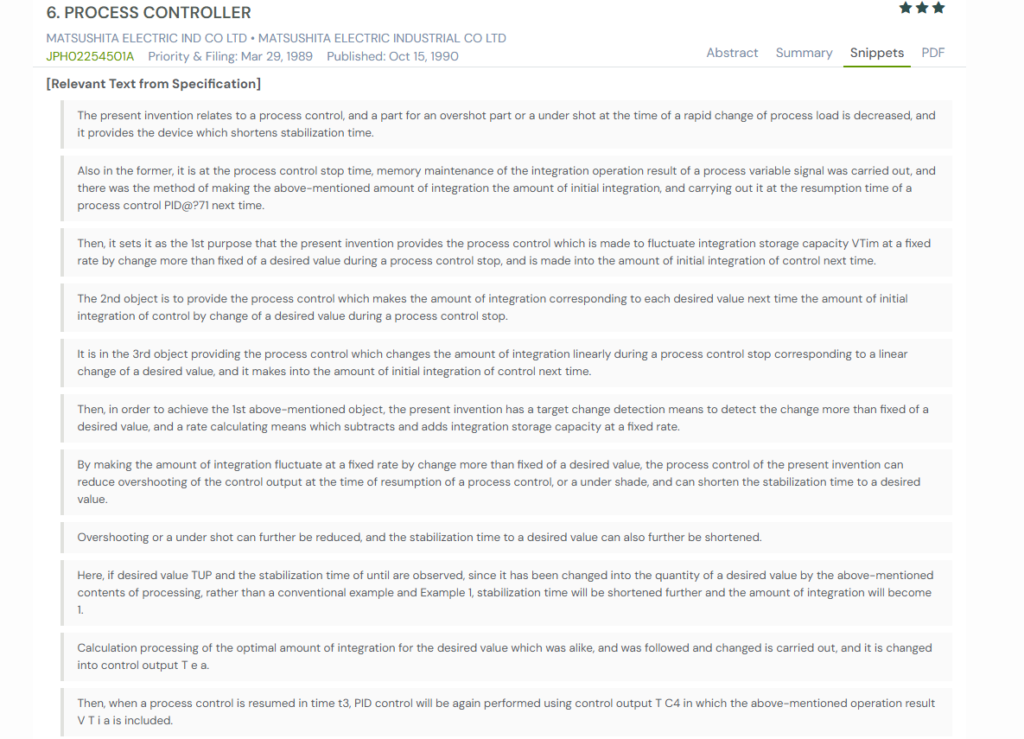
JPH02254501A, filed by Matsushita Electric Industrial Co., Ltd., focuses on this restart problem in process controllers. Instead of freezing the integral value during a stop, the patent adjusts the stored integration amount based on how much the target value changes while control is paused. If the desired value shifts significantly, the controller updates the integration level at a controlled rate so it better matches the new target when operation resumes.
By doing this, the controller does not restart blindly. It resumes PID control with an integration value already aligned to the new process conditions, reducing both overshoot and stabilization time. This thinking closely aligns with US7249882B2, where smarter integration initialization helps systems settle faster without aggressive temperature swings.
Why This Approach Mattered
This patent showed that integrated memory should adapt to changing conditions, not just be preserved. By adjusting integration during downtime it helped controllers restart smoothly and reach stable operation faster.
Temperature controllers are not the only systems that suffered from rigid startup assumptions. Memory systems ran into the same problem years ago. US8407411B2 shows how DRAM stopped running at a fixed speed and instead learned to watch its own workload, slowing down when idle and speeding up only when needed.
4. JPS63132302A
When a controller starts up or when a target value changes, the biggest problem is not steady control. It is the first few moments after the change. That is where overshoot usually appears and where systems waste time settling back down.
JPS63132302A, also filed in Japan by Omron Tateisi Electronics Co. in collaboration with STMicroelectronics, focuses on setting a better initial value for the integral term when PID control begins or when the set value changes.
Instead of starting integration blindly, the controller remembers the operation level from a stable state and uses it as a starting point next time.
If the set value changes, the patent automatically recalculates this stored integration value in proportion to the new target. This allows the controller to enter stable control faster, with far less overshoot, rather than rebuilding control from scratch.
Why This Approach Mattered
This patent showed that remembering and adjusting integration values leads to smoother transitions. By starting closer to a stable operating point, controllers could reduce overshoot and reach steady control much faster.
5. JPS6426204A
When a system has a delay built into it, temperature control becomes harder than it looks. You turn the output on, nothing happens for a while, then the temperature suddenly reacts. Turn it off, and the effect lingers again. These dead-time systems are exactly where overshoot and long settling times tend to show up.
JPS6426204A, filed by Sekisui Chemical Co., Ltd., tackles this problem by observing how a system behaves during controlled ON and OFF switching around a preset value. Instead of guessing system characteristics, the controller deliberately allows the temperature to move within a fixed hysteresis range. From this movement, it measures delay, response slope, and amplitude directly from real operation.
Those measurements are then used to identify PID parameters that better match systems with dead time. Rather than relying on static assumptions, the controller learns from the system’s actual behavior before settling into PID control. This thinking closely supports US7249882B2, which also relies on observing real temperature swings to initialize control more intelligently.
Why This Approach Mattered
This patent showed that delay-heavy systems need parameters learned from real behavior, not estimates. By measuring dead time and response directly, it helped reduce overshoot and shorten stabilization time in practical control environments.
Engineers often chase better algorithms when instability shows up, but sometimes the fix is structural. US7177838B1 strips digital transactions down to a direct vendor–user exchange using electronic tokens. The simplicity is the point, and it echoes a pattern seen across many stable systems.
How These Patents Compare to US7249882B2
Each of these patents tackles overshoot and slow stabilization from a different angle. Some focus on what happens after auto-tuning, others on power cycles, restarts, or system delay. Together, they show how control logic gradually moved toward smarter integration initialization, which is exactly where US7249882B2 fits in.
| Patent | Core Problem Addressed | How It Approaches Control | Connection to US7249882B2 |
| JPH033007A | Instability right after auto-tuning ends | Smooths the transition by holding output and matching it to the system load before switching to PID | Highlights that poor mode switching causes instability, a problem that US7249882B2 solves through smarter integration startup |
| JPS598001A | Overshoot after power is restored | Restores a previously stable integration value instead of restarting from zero | Shares the idea that integration should not restart blindly |
| JPH02254501A | Overshoot when restarting after a stop with a changed target | Adjusts stored integration based on how much the target value changes during downtime | Reinforces adaptive integration instead of static initialization |
| JPS63132302A | Overshoot during startup or setpoint changes | Uses remembered steady-state operation as the initial integration value | Aligns closely with US7249882B2’s focus on better integration starting points |
| JPS6426204A | Poor control in systems with dead time | Learns delay and response from controlled ON/OFF oscillations | Supports the same observation-driven approach used by US7249882B2 during auto-tuning |
How Global Patent Search Helps Connect These Control Ideas
When PID and process control patents are read in isolation, each one feels like a small fix to a narrow problem. The real value comes from seeing how ideas around auto-tuning, integration initialization, and stability evolved across different systems and time periods.
This is where the Global Patent Search tool helps.

How to use GPS for this analysis:
- Start with the core patent: Enter US7249882B2 to surface patents related to integration, starting values, auto-tuning behavior, and temperature stabilization.
- Sort results by relevance: Use the Sort by Relevance feature to bring forward patents that share similar control behavior, not just similar keywords.
- Review summaries first: Scan short descriptions to quickly understand what problem each patent addresses before opening full specifications.
- Follow earlier references: Move backward through earlier filings to see how solutions for overshoot, restart behavior, and dead time were developed.
If you want a faster way to understand how control strategies evolved without getting buried in technical language, try the Global Patent Search tool today.
Frequently Asked Questions
1. Why does a PID controller cause temperature overshoot?
Temperature overshoot usually happens when the controller reacts too aggressively as it approaches the set value. The integral term keeps adding correction based on past error, even when the temperature is already close to the target. This stored correction pushes the system past the desired temperature before it can stabilize.
2. How does the integral term affect PID temperature stability?
The integral term helps remove steady-state error, but it can also cause instability if it starts from a poor initial value. When integration builds too quickly or starts from zero inappropriately, it can lead to overshoot, slow settling, or oscillation.
3. What is auto-tuning in PID controllers?
Auto-tuning is a process where the controller temporarily applies controlled ON and OFF actions to observe how a system responds. From this behavior, it estimates suitable PID parameters. Auto-tuning can help reduce manual trial-and-error but still requires careful handling of how the controller transitions back into normal PID control.
4. Why do PID controllers behave poorly after restart or power-on?
After a restart, the controller often loses its previous integration state and starts correcting from zero. This sudden reset ignores the system’s prior stability and causes aggressive correction. The result is overshoot or slow stabilization until the controller rebuilds its internal state through integration over time.
5. How can temperature settling time be reduced in PID control?
Settling time can be reduced by improving how the controller initializes and transitions into control. Smarter handling of integration, observing real system response during tuning, and avoiding abrupt mode changes help the system reach the target temperature faster without overshoot or unnecessary oscillations.
Disclaimer: The information provided in this article is for informational purposes only and should not be considered legal advice. The related patent references mentioned are preliminary results from the Global Patent Search tool and do not guarantee legal significance. For a comprehensive related patent analysis, we recommend conducting a detailed search using GPS or consulting a patent attorney.